Delta Kinematics
A Fully Self Designed Rotary Delta Motion System
One of the most ambitious personal projects with the goal of learning and applying the process of integrating hardware and software into a single system.
ENGINEERING
The Start
Every successful project starts with a goal, and this one is no different.
My objective is to design and build a Rotary Delta kinematic motion system from the ground up covering feasibility research, groundwork, development, manufacturing, and programming, through to final assembly.
But why?
The purpose is twofold: to deepen my understanding of systems integration across multiple disciplines and to refine my ability to manage every stage of a complex engineering project from start to finish.

R&D and Digital Twin
What is a Motion System?
To start, we need to establish some groundwork. A standard machine uses a Cartesian motion system, where a movement in X requires only the corresponding axis to move to achieve a translation. While this can become complicated if different coordinate systems are used for the “World” and the Effector, that remains an edge case.
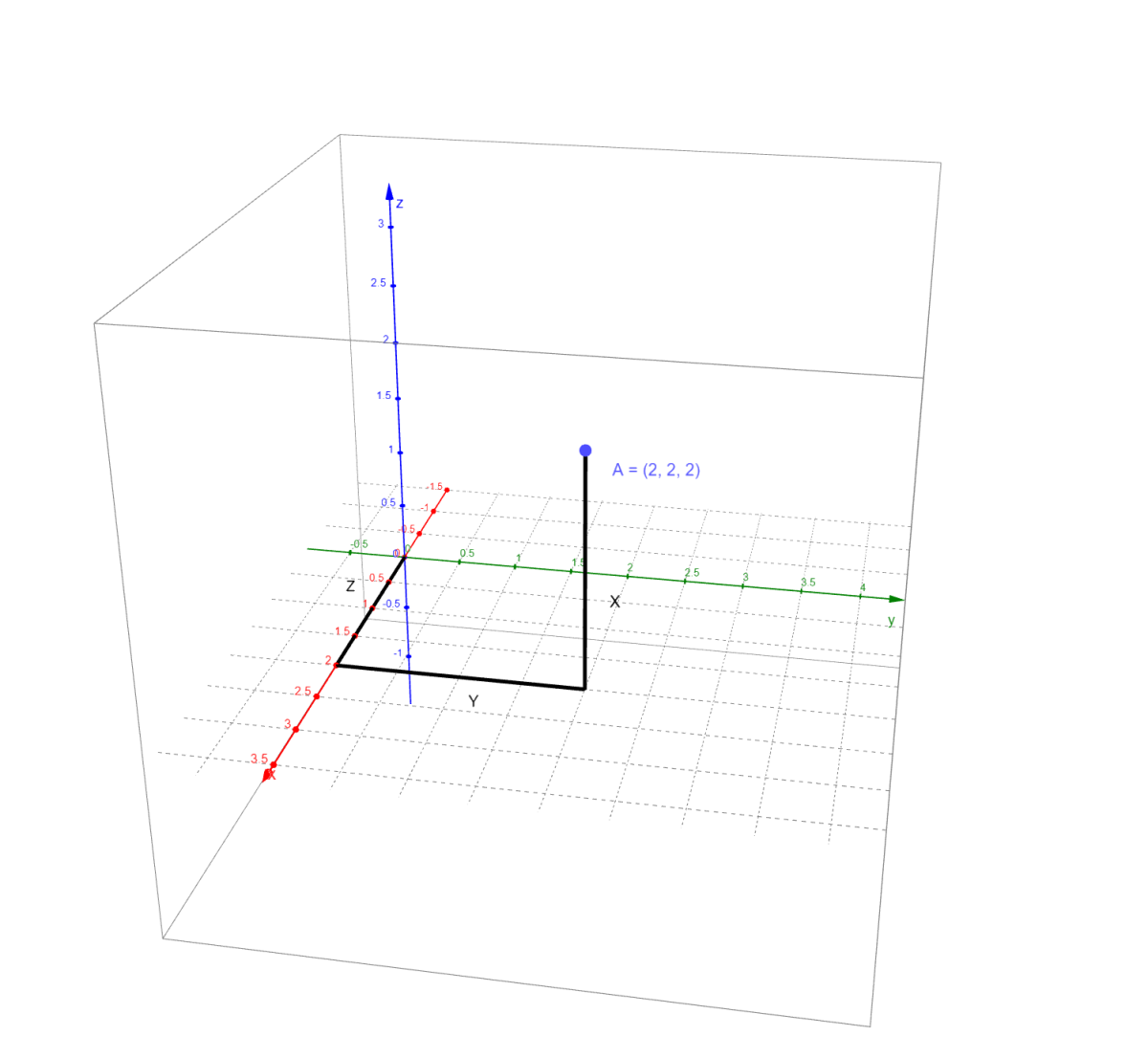
Non-Cartesian systems, on the other hand, require mathematical computation to determine movement. A simple example is a two-link arm: a stick pivoting around a point with a second stick pivoting at its end. In this setup, you can reach any point in a 2D space. By knowing the angles of the two joints, you can calculate the coordinates of the end of the second link (SCARA). This is the foundation of a Non-Cartesian system. It allows movement in 2D or 3D space but requires knowing the relative position of every part to extract the XYZ coordinates.
Delta systems are a subcategory where the “tool” (effector) is positioned in 3D space using three linkages that move along the same primary axes. By combining the movement of these three linkages, the effector's location is determined.
Rotary Deltas are a further sub-specialization, where the angle of a “bicep” and the lengths of the linked rods dictate the final position.
DELTA
Why use a Rotary Delta Motion System
Sed pede ullamcorper amet ullamcorper primis, nam pretium suspendisse neque, a phasellus sit pulvinar vel integer.

Virtual Twin and Simulation
I developed a MATLAB Simulink model to map trajectories from Cartesian inputs to specific motor angles and real-time effector positions.
By implementing the inverse kinematics for the rotary delta geometry and building a Simscape virtual twin, I was able to stabilize the control loops and tune the PID gains while identifying the order of magnitude of the mechanical forces.
This digital validation was essential for determining the specific torque and structural requirements the motors and mechanical elements needed to withstand.


Credit
This project required a lot of personal research and development to achieve the final project. I must thank many of the Professors of the HES-SO Valais-Wallis university for the guidance they provided.